
具現化ロボット革新設計プラットフォーム(強化版)GX-MAT-09S
エンジニアリングレベルのエンボディド複合ロボット設計キット。11種類のシャーシ+7種類のロボットアーム、80種類以上の複合ロボット構成の構築をサポート。12Vエンコーダ付きDCモーターを採用し、シャーシの最大積載量は25kg。制御はArduino、STM32、エッジコンピューティングボードを網羅し、マルチレベルの開発をサポート。ビジョンやLiDARなどの主流ロボットセンサーを搭載。専門的なイノベーショントレーニングに適しています。
対象/シナリオ
大学ロボット実験・研究開発・競技トレーニング
主な特長
- 11 種のモバイルシャーシ + 7 種のロボットアームで 88 種の複合ロボットを構成
- AI ビジョン、音声、IMU、ライントレース、LiDAR など多モーダルセンシングを統合
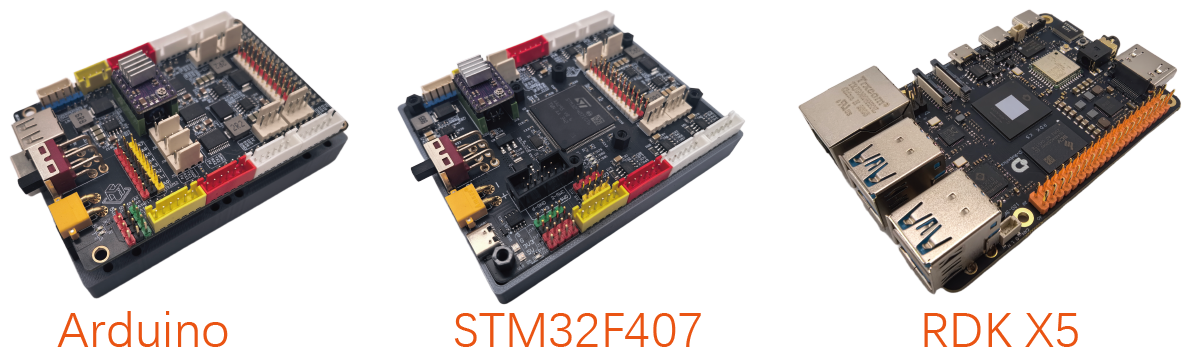
- Arduino + STM32 + Horizon RDK X5(10 TOPS)の三層コントローラスタック
製品特徴
具現化システムの分解学習
モバイル複合ロボットの構造・駆動・センシング・制御を分解し、具現化ロボットの知覚―意思決定―行動ループを可視化します。
モジュール型の学習ルート
11 種のシャーシ、7 種のロボットアーム、88 種の複合形態を用意し、設計・組立・キャリブレーション・制御を一気通貫で学べます。
フルスタックセンシング
AI ビジョン、単眼カメラ、音声インタラクション、姿勢 IMU、障害物/ライントレース、ナビゲーション LiDAR を統合し、具現化ロボットの環境認識を実現します。
多層コントローラ構成
Arduino での可視化/C++ 入門、STM32 による専門的 MCU 開発、Ubuntu+ROS を搭載した Horizon RDK X5(10 TOPS)で高度な具現化応用まで対応します。
カリキュラムと競技に対応
機械原理、センサ計測、マイコン、ロボティクス、ROS、モバイルナビゲーションなどの授業に対応し、大学ロボット創意工夫競技や工学実践イノベーション競技にも活用できます。
実習シナリオ
典型的な具現化ロボットのシャーシとロボットアームをモジュール化して提供し、差動・全方向・ステアリング・双腕など 88 種の複合ロボットを迅速に構築できます。
ロボットシャーシ
ロボットアーム構成
複合ロボット
構成
センサ構成
具現化ロボットに必要なセンシング群を統合し、環境知覚・音声インタラクション・ナビゲーション・ライントレースなどの機能を単一プラットフォームで実装できます。
- AI ビジョンカメラ
- 単眼イメージングモジュール
- AI 音声認識モジュール
- 姿勢 IMU センサ
- 障害物回避/ライントレースセンサアレイ
- ナビゲーション級 LiDAR
コントローラ構成
三層コントローラ構成:Arduino(グラフィカル/C++ 入門)、STM32F407(専門 MCU 開発)、Horizon RDK X5(Ubuntu + ROS、10 TOPS エッジ AI)を組合せ、授業からロボット研究まで全領域をカバーします。
ソフトウェア構成
Arduino IDE、STM32 開発ツール、Ubuntu/ROS 環境とサンプルプロジェクトを提供し、ハードウェアドライバから AI・ROS アプリケーションまで一気通貫で開発できます。
Arduino ライブラリ、HAL/FreeRTOS、ROS/MoveIt、OpenCV、YOLO、音声認識 SDK などのオープンエコシステムと互換性があり、授業・研究リソースを素早く統合できます。
実験項目
マイコン、センサ、組込み Linux、コンピュータビジョン、シャーシ設計、ロボットアーム制御、複合ロボット、ROS、ナビゲーションまでを網羅し、入門から応用までの学習ルートを形成します。
モータ総合プロジェクト
DC モータとサーボの制御、エンコーダ計測と PID 制御を習得します。
- DC モータ制御:ブラシ付き DC モータのデジタル制御と駆動要点を学ぶ。
- エンコーダ付き DC モータ制御:エンコーダデータを取得し、PID の原理と速度閉ループ制御を実装する。
- サーボ制御:myservo.attach()/write() を用いてサーボ角度を精密制御する。
センサプロジェクト
TTL、ライントレース、超音波、IMU、音声、AI ビジョンなどの主要センサを網羅します。
- TTL センサ実験:TTL センサのパラメータ取得と応用方法を習得する。
- 四路ライントレース:ロボットのライントレース制御を実装する。
- 超音波距離計測:測距アルゴリズムを理解し、環境に合わせた調整を行う。
- ジャイロセンサー:`MPU6050.cpp` を使用して姿勢情報を取得する。
- 音声認識センサ:`HBR640.h` を呼び出して音声認識とコマンドトリガーを実現する。
- AIビジョンセンサー:カメラ映像表示と AI ビジョン推論のワークフローを習得する。
組込み Linux プロジェクト
Ubuntu と Python を用いて GPIO、データ処理、マルチスレッド、ネットワーク通信を実践します。
- システム導入:Ubuntu をインストールし、SSH とファイルシステム操作を習得する。
- GPIO 制御:Python で LED とボタンを制御し、標準 GPIO ライブラリを使いこなす。
- センサデータ収集:複数センサのデータ取得・フィルタリング・GUI 表示を行う。
- ネットワーク通信と Web サーバ:ソケット通信を実装し、Web サーバでデータを公開する。
- マルチスレッド:threading モジュールで並列処理を実装し、同期と排他を学ぶ。
コンピュータビジョンプロジェクト
RDK X5 とカメラを活用し、色・形状・QR・追跡・検出・データセット作成までを実装します。
- カラー認識:OpenCV で色空間を変換し、分別・追跡を実現する。
- 形状認識:エッジ検出と輪郭抽出で形状分類を行う。
- QR コード認識:OpenCV/zbar で QR コードをデコードし、情報を処理する。
- ジンバルによる図形追跡:画像を取得し、特定図形を追跡するジンバル制御を行う。
- カラーターゲット追跡:カラーターゲットを認識し、自律追従を実現する。
- 顔認識:OpenCV/dlib を用いて顔検出、特徴抽出、認識アプリケーションを行う。
- ビジュアルラインフォロー:地面軌跡を識別する視覚アルゴリズムを作成し、ビジュアルラインフォローを実現する。
- YOLO デプロイ:YOLO モデルをデプロイし、リアルタイムの物体検出と分類を行う。
- データセットアノテーション:LabelImg/RectLabel を使用して独自のビジョンデータセットを作成・管理する。
- 果物認識:RDK X5 上に深層学習モデルをデプロイし、リアルタイム果物認識を行う。
- ロボットアーム認識搬送:視覚認識とロボットアーム制御を組み合わせ、自動把持搬送を実現する。
モバイルシャーシプロジェクト
差動・全方向・スウェーデンホイール・メカナム・ステアリングなどのシャーシ組立と制御を行います。
- 三輪差動シャーシ:組立、ステアリング制御、オドメトリ調整を行う。
- 四輪差動シャーシ:組立、ステアリング制御、オドメトリ調整を行う。
- 六輪差動シャーシ:組立、ステアリング制御、オドメトリ調整を行う。
- 三輪スウェーデンホイールシャーシ:組立、ステアリング制御、オドメトリ調整を行う。
- 四駆差動シャーシ:組立、ステアリング制御、オドメトリ調整を行う。
- 四輪スウェーデンホイールシャーシ:組立、ステアリング制御、オドメトリ調整を行う。
- 四輪メカナムシャーシ:組立、ステアリング制御、オドメトリ調整を行う。
- 四駆スウェーデン+メカナムシャーシ:組立、ステアリング制御、オドメトリ調整を行う。
- 四駆独立ステアリングシャーシ:組立、ステアリング制御、オドメトリ調整を行う。
ロボットアームプロジェクト
直列アームから SCARA、双腕までを組立・駆動し、運動学制御を学習します。
- 4 自由度直列ロボットアーム:組立、駆動制御、運動学制御を行う。
- 5 自由度直列ロボットアーム:組立、駆動制御、運動学制御を行う。
- 6 軸直列ロボットアーム:組立、駆動制御、運動学制御を行う。
- SCARA ロボットアーム:組立、駆動制御、運動学制御を行う。
- 双腕ロボット:双腕の組立、協調駆動制御、運動学制御を行う。
- 昇降双腕ロボット:昇降機構付き双腕の組立、制御、運動学調整を行う。
複合ロボットプロジェクト
シャーシとロボットアームを組み合わせ、応用指向の具現化ロボットを構築します。
- 三輪差動複合ロボット:ジンバル、SCARA、六軸などの複合形態を構築する。
- 四輪差動複合ロボット:ジンバル、4/5/6 軸、SCARA、双腕、双腕リフトを構築する。
- 六輪差動複合ロボット:ジンバル、4/5/6 軸、SCARA、双腕、双腕リフトを構築する。
- 三輪全方向複合ロボット:ジンバル、4/5/6 軸、SCARA、双腕、双腕リフトを構築する。
- 四駆差動複合ロボット:ジンバル、4/5/6 軸、SCARA、双腕、双腕リフトを構築する。
- 四輪全方向複合ロボット:ジンバル、4/5/6 軸、SCARA、双腕、双腕リフトを構築する。
- 四輪操舵複合ロボット:ジンバル、4軸、SCARA の3方式。
ROS プロジェクト
ROS の起動、機能パッケージ開発、MoveIt によるモーション制御を学びます。
- ROS 体験実験:ファイル構造を理解し、トピック/サービス/パラメータで turtlesim と移動ロボットを制御する。
- ROS 機能パッケージ構築・移植:機能パッケージを作成・コンパイルし、キーボード操作の移動ロボット制御を実装する。
- URDF モデルと MoveIt 制御:URDF モデルを作成して Rviz に表示し、MoveIt でロボットアームの運動学制御を行う。
移動ロボットのナビゲーションと位置決め
Cartographer、Hector、Gmapping の理論からパラメータ調整までを網羅します。
- 高速ナビゲーション体験:Cartographer・Hector・Gmapping を実行し、それぞれの適用シーンを比較する。
- Cartographer マッピング:原理解説、パッケージ分解、設定、全パラメータチューニングを実施する。
- Hector マッピング:パッケージ構成を理解し、設定と全パラメータチューニングを行う。
- Gmapping による地図作成:原理と設定フローを理解し、全パラメータ調整と地図生成を完了する。
ナレッジベース
この製品に関する詳細な技術ドキュメント、チュートリアル、よくある質問をご覧ください。
重要な質問
Q2:大学で“ROS”および“移動ロボット航法”の授業を行う場合、どの製品が最適で、その強みは?具現化ロボット革新設計プラットフォーム(強化版)GX-MAT-09S携帯型 ROS ナビゲーション学習プラットフォーム UNI-WR2
回答:ROS と移動ロボットナビゲーションの授業に最も適している製品は、ポータブル ROS ナビゲーションロボット学習プラットフォーム UNI-WR2と、具身ロボット革新設計プラットフォーム(強化版)GX-MAT-09Sです。主な優位点は以下のとおりです。
UNI-WR2:
• 導入の柔軟性:超小型・軽量(13cm未満、550g未満)で、最小 60cm×60cm の卓上スペースでも SLAM ナビゲーションを実現でき、大きな実験場を必要としません。
• 教学の深さ:ROS の工学的な導入プロセスを 5 段階(原理 → デモ → フレームワーク分解 → 機能パッケージ設定 → 全パラメータ調整)に分解し、Cartographer、Hector、Gmapping の3種類のナビゲーション方式と組み合わせて段階的な実験を設計できます。
GX-MAT-09S:
• 機能の充実:ROS 授業を支援し、11種類のシャーシと7種類のロボットアーム構成を組み立て可能です。さらに LiDAR(測距範囲 0.12〜8m)と組み合わせることで、移動ロボットのナビゲーションと自己位置推定の実習をカバーできます。
• 計算性能:RDK X5 メインボード(10TOPS)を搭載し、Ubuntu + ROS をプリインストール。SLAM 地図作成や自律障害物回避などの複雑なアルゴリズムの実行と調整を支えます。

