
エンボディド・ロボット イノベーションデザインキット (40-in-1) Ubot MR40
シャーシ、ロボットアーム、複合ロボットを含む 40 種類の代表的な具現化ロボット構成をゼロから構築できます。グラフィカルプログラミング、C++(Arduino)、Python に対応し、段階的なカリキュラムとあわせて、ロボット入門教育、探究活動、競技会向けの実践に適しています。
対象/シナリオ
K12、専門・高専1年、学部1年生
主な特長
- 40種類の代表的なロボット形態を構築可能なモジュール設計
- ビジュアルプログラミングおよびC++/Python開発に対応
- ロボット入門教育から探究活動・競技会まで幅広く対応
製品特徴
プログラミング方式
Ubot MR40 は、プログラミング未経験の学習者でも使い始められるよう設計されています。ドラッグ&ドロップ型のビジュアルプログラミングで基礎制御を学べるほか、一定の基礎がある学習者は C++ や Python による、より高度で専門的な開発にも進めます。
組立方式
組立難易度を一つ一つの穴の設計まで細かく考慮し、間隔、サイズ、ねじ穴かどうかなどを含め、強度を確保しながら、不要なナットをできるだけ減らして組立難易度を下げ、学習者が入門しやすく、学習のエネルギーを全体設計に集中できるようにしています。
実習シナリオ
サンプル機はモジュール設計を採用し、ロボットシャーシ構成は差動輪モジュール、方向輪モジュール、全方向輪モジュール、操舵輪モジュール、全方向メカナムホイールモジュール、グリッパーモジュール、スイングモジュールを組み合わせて、三輪二駆差動シャーシ、三輪二駆前輪操舵シャーシ、四輪二駆差動シャーシ、四輪四駆差動シャーシ、四輪四駆メカナム全方向シャーシを設計しています。ロボットアーム構成はスイングモジュール、ターンテーブルモジュール、グリッパーモジュールを組み合わせて、雲台、3自由度ロボットアーム、4自由度ロボットアーム構成を設計しています。
ロボットモジュール
ロボットシャーシ
ロボットアーム構成
複合ロボット
構成
センサ構成
姿勢検出センサ、4 チャンネルラインセンサ、超音波センサ 2 基、音声認識センサ、スピーカーモジュール、PS コントローラを統合しており、自動障害物回避、迷路走行、自律バック駐車、ラインフォロー、音声対話、リモート操作などを実現できます。Ubot MR40 を使って、月面探査を模したような発展的なプロジェクト実践にも取り組めます。
- 六軸ジャイロセンサ
- 四線ライントレースセンサ
- 超音波センサ
- 音声認識センサ
- スピーカーモジュール
- リモートコントローラ
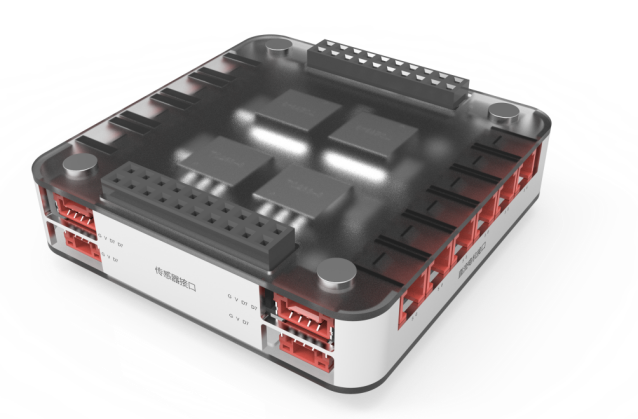
コントローラ構成
コントローラは一般的なプログラミング言語プログラムの入力をサポートし、ブロック型、C++、Pythonなどのプログラミング言語でプログラムを作成できます。豊富なインターフェースが含まれており、6チャンネルDCモータインターフェース、8チャンネルサーボインターフェース、4チャンネル超音波インターフェース、4チャンネルライントレースセンサインターフェース、4チャンネル拡張IOセンサインターフェース、USBシリアルポートなどがあります。コントローラはスタッカブルデザインを採用し、拡張ドックとの接続用スペースを予約しており、ユーザーが他の電子ハードウェアとコントローラを接続して使用するのに便利です。
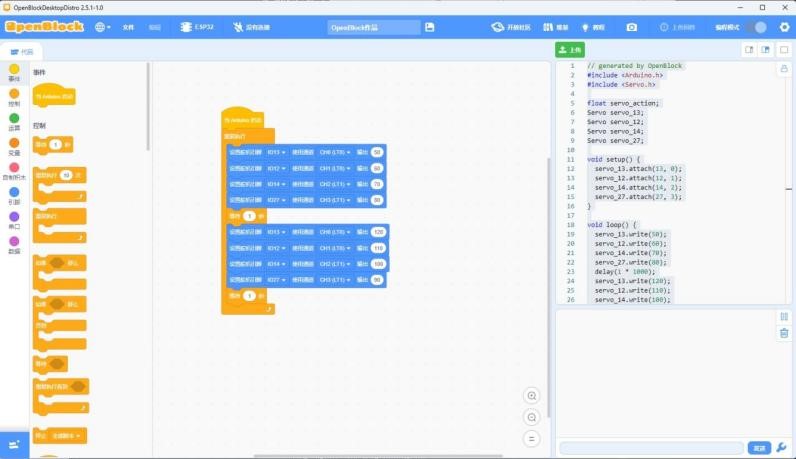
ソフトウェア構成
ソフトウェアはOpenBlockプログラミングソフトウェアを統合し、ブロック型プログラミングとC++、Pythonコードプログラミングをサポートし、ソフトウェアプログラミングにもハードウェアデバイスプログラミングにも使用でき、ハードウェアコード生成およびコンパイルダウンロード機能をサポートし、ハードウェアデバイスとの間のリアルタイム通信を通じて実現されるリアルタイム実行モードもサポートしています。
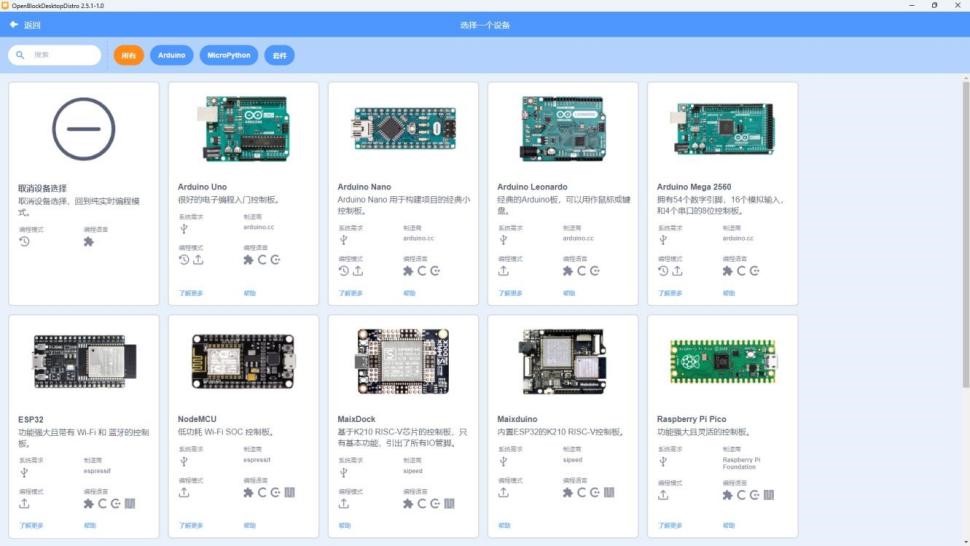
Openblockのハードウェアエコシステムは完全で、市場で一般的なメーカーハードウェアプラットフォーム、Arduino、MicroPython、ESP32をサポートし、ユーザーは自由に拡張できます。
ナレッジベース
この製品に関する詳細な技術ドキュメント、チュートリアル、よくある質問をご覧ください。

